 My
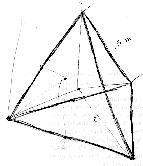
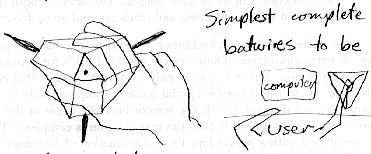
"bat" is a mechanical device for 3D input. You reach into a tetrahedral
"cage" and grasp the "bat", whose movement is transmitted to the computer.
I designed it, but never completed a physical prototype.
My
"bat" is a mechanical device for 3D input. You reach into a tetrahedral
"cage" and grasp the "bat", whose movement is transmitted to the computer.
I designed it, but never completed a physical prototype.
I did start work on a virtual prototype in 1996 using World Up, so that you can see how it really looks and operates in 3D. To the right is a screenshot from the work-in-progress:
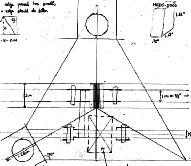
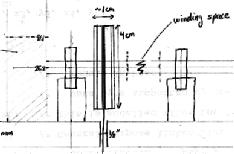
Details: Consists of a tetrahedral cage with a hand-held "bat" suspended on wires from each corner of the cage. Advantages:
-
Purely mechanical - no optical, sonic or magnetic interference to cause instability or high cost
-
Simple electronics - requires just four optical shaft encoders similar to the two found in every normal mouse
-
Unlike existing 3D trackers, doesn't require you to hold your arm in the air; the weight of your arm is balanced by the wire tension for comfortable long-term navigation
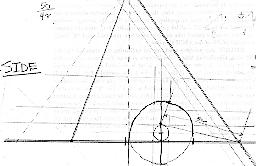
 Sensors
at each corner of the cage track the distance of the bat from the corner. These
4 distances can be run through a matrix operation to get a 3D position.
Sensors
at each corner of the cage track the distance of the bat from the corner. These
4 distances can be run through a matrix operation to get a 3D position.
The "bat" name has been used by some other, unrelated people as well - strangely, apparently all Canadian, including:
- [LG94] LIANG, J., GREEN, M.: JDCAD: A Highly Interactive 3D Modelling System, Computers and Graphics, Vol. 18, No. 4, pp. 499 - 506, 1994 (seem to have simply glued some buttons on an Ascension Bird)
- Colin Ware, whose "bat" has been used by some VR researchers
When designing tetrahedral structures, it may be handy to consult my tetrahedra data sheet.